

Original Post


[REL] Mod Syntax Thingy For Forums (with source (VB.NET))
Well its time for another pointless release, but this time I will release the source, so people can learn from it, therefore making it less pointless. :O
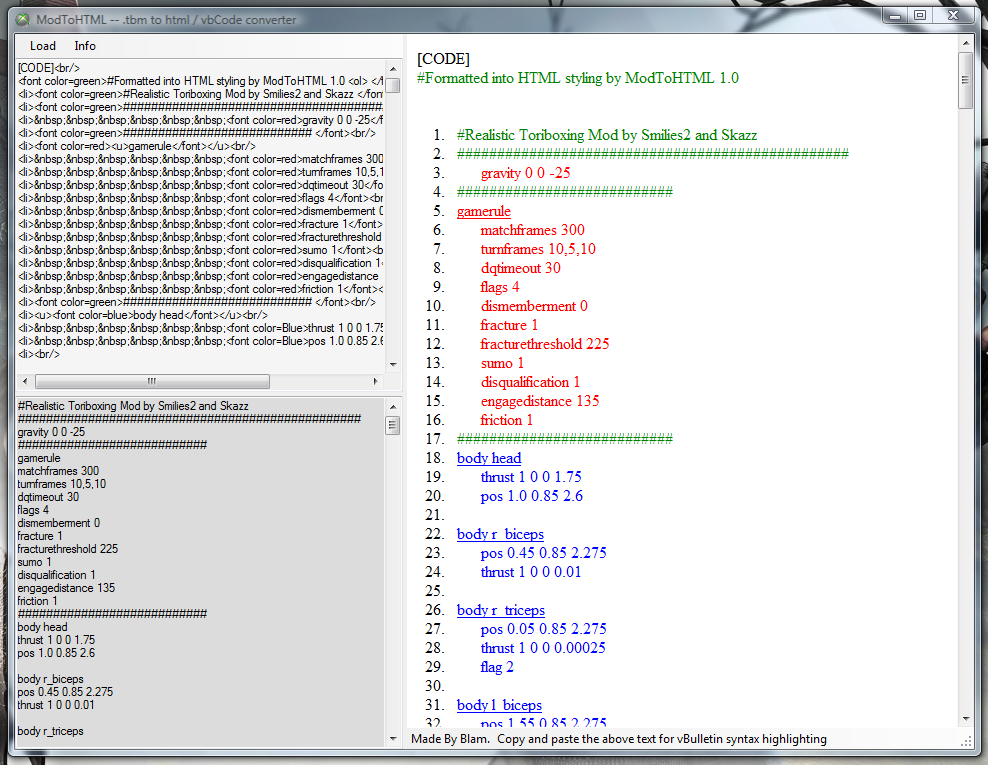
Now what it does, is that it converts a mod into a HTML styled thing. You can then copy and paste the text in the WHITE box into the forums, and it comes out nice and syntaxed. Usefull for say tutorials.
Release -- 69kb
Source (VB 2008 (.NET)) -- 1.261mb
</bigtext>
Release -- 69kb
Source (VB 2008 (.NET)) -- 1.261mb
</bigtext>
:D
Example (whips.tbm):
#Formatted into HTML styling by ModToHTML 1.0 - # mod by ronalds
- gamerule
- engagedistance 290
- match frames 180
- turn frames 10, 10, 15, 15, 20, 20, 30, 30, 30
- env_obj 1
- shape box
- pos 2.6 1.4 2.2
- color 0.3 0.3 0.3
- rot
- sides 0.3 0.02 0.02
- mass 0.0001
- env_obj 2
- shape box
- pos 2.9 1.4 2.2
- color 0.3 0.3 0.3
- rot
- sides 0.3 0.02 0.02
- mass 0.0001
- env_obj 3
- shape box
- pos 3.2 1.4 2.2
- color 0.3 0.3 0.3
- rot
- sides 0.3 0.02 0.02
- mass 0.0001
- env_obj 4
- shape box
- pos 3.5 1.4 2.2
- color 0.3 0.3 0.3
- rot
- sides 0.3 0.02 0.02
- mass 0.0001
- env_obj 5
- shape box
- pos 3.8 1.4 2.2
- color 0.3 0.3 0.3
- rot
- sides 0.3 0.02 0.02
- mass 0.0001
- env_obj 6
- shape box
- pos 4.1 1.4 2.2
- color 0.8 0.3 0.3
- rot
- sides 0.3 0.02 0.02
- mass 0.0001
- flag 6
- env_obj 7
- shape box
- pos 4.4 1.4 2.2
- color 0.8 0.3 0.3
- rot
- sides 0.3 0.02 0.02
- mass 0.0001
- flag 6
- env_obj 8
- shape box
- pos 2.5 -1.6 2.2
- color 0.5 0.5 0.5
- sides 0.03 0.6 1.0
- mass 0.003
- env_obj 9
- shape box
- pos -0.6 -1.6 2.2
- color 0.3 0.3 0.3
- rot
- sides 0.3 0.02 0.02
- mass 0.0001
- env_obj 10
- shape box
- pos -0.9 -1.6 2.2
- color 0.3 0.3 0.3
- rot
- sides 0.3 0.02 0.02
- mass 0.0001
- env_obj 11
- shape box
- pos -1.2 -1.6 2.2
- color 0.3 0.3 0.3
- rot
- sides 0.3 0.02 0.02
- mass 0.0001
- env_obj 12
- shape box
- pos -1.5 -1.6 2.2
- color 0.3 0.3 0.3
- rot
- sides 0.3 0.02 0.02
- mass 0.0001
- env_obj 13
- shape box
- pos -1.8 -1.6 2.2
- color 0.3 0.3 0.3
- rot
- sides 0.3 0.02 0.02
- mass 0.0001
- env_obj 14
- shape box
- pos -2.1 -1.6 2.2
- color 0.8 0.3 0.3
- rot
- sides 0.3 0.02 0.02
- mass 0.0001
- flag 6
- env_obj 15
- shape box
- pos -2.4 -1.6 2.2
- color 0.8 0.3 0.3
- rot
- sides 0.3 0.02 0.02
- mass 0.0001
- flag 6
- env_obj 16
- shape box
- pos -0.5 1.4 2.2
- color 0.5 0.5 0.5
- sides 0.03 0.6 1.0
- mass 0.003
- env_obj_joint 1 1 2
- pos 2.75 1.4 2.2
- axis 0 1 0
- range 1 -1
- strength 0
- velocity 0
- visible 0
- mass 0.0001
- env_obj_joint 2 2 3
- pos 3.05 1.4 2.2
- axis 0 0 1
- range 1 -1
- strength 0
- velocity 0
- visible 0
- mass 0.0001
- env_obj_joint 3 3 4
- pos 3.35 1.4 2.2
- axis 0 1 0
- range 1.2 -1.2
- strength 0
- velocity 0
- visible 0
- mass 0.0001
- env_obj_joint 4 4 5
- pos 3.65 1.4 2.2
- axis 0 0 1
- range 1.3 -1.3
- strength 0
- velocity 0
- visible 0
- mass 0.0001
- env_obj_joint 5 5 6
- pos 3.95 1.4 2.2
- axis 0 1 0
- range 1.4 -1.4
- strength 0
- velocity 0
- visible 0
- mass 0.0001
- env_obj_joint 6 6 7
- pos 4.25 1.4 2.2
- axis 0 0 1
- range 1.5 -1.5
- strength 0
- velocity 0
- visible 0
- mass 0.0001
- env_obj_joint 7 9 10
- pos -0.75 -1.6 2.2
- axis 0 1 0
- range 1 -1
- strength 0
- velocity 0
- visible 0
- mass 0.0001
- env_obj_joint 8 10 11
- pos -1.05 -1.6 2.2
- axis 0 1 0
- range 1 -1
- strength 0
- velocity 0
- visible 0
- mass 0.0001
- env_obj_joint 9 11 12
- pos -1.35 -1.6 2.2
- axis 0 1 0
- range 1.2 -1.2
- strength 0
- velocity 0
- visible 0
- mass 0.0001
- env_obj_joint 10 12 13
- pos -1.65 -1.6 2.2
- axis 0 1 0
- range 1.3 -1.3
- strength 0
- velocity 0
- visible 0
- mass 0.0001
- env_obj_joint 11 13 14
- pos -1.95 -1.6 2.2
- axis 0 1 0
- range 1.4 -1.4
- strength 0
- velocity 0
- visible 0
- mass 0.0001
- env_obj_joint 12 14 15
- pos -2.25 -1.6 2.2
- axis 0 1 0
- range 1.5 -1.5
- strength 0
- velocity 0
- visible 0
- mass 0.0001
:D
Cool, I don't get it.
Originally Posted by MrPoptart

Cool, I don't get it.
as i say, its quite pointless. Its only real use would be for say tutorials.
oh and it annoyed Juntalis, by making him not the first person to release a program to do with mods
Last edited by Blam; Jul 27, 2008 at 01:39 PM.
:D
y does it have an xbox 360 symbol in the corner of the program, LOL?